6 API interface function list¶
6.1 General function library¶
The SDK supports VR general functions in the following red dot-marked engine:
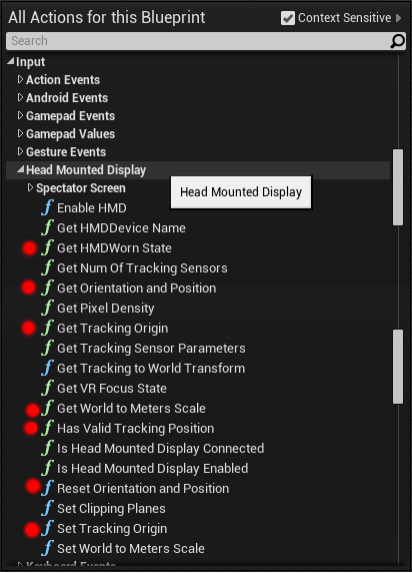
Figure 6.1 Supported general functions
For their detailed usage, please refer to the official UE4 document at https://docs.unrealengine.com/en-us/.
Among them:
- Reset Orientation and Position nodes only support the function of resetting the positive direction, and the Yaw parameter values in the function node does not work.
- Using Get HMDWorn State requires enabling option “Enable Psensor” in Project Setting - PicoMobile
6.2 Dedicated function library¶
For system functions such as volume and brightness, the SDK also provides the corresponding APIs in the form of blueprint nodes, and in case of right-click on the event graph, and you can see these APIs after entering the Pico Mobile sub-item:
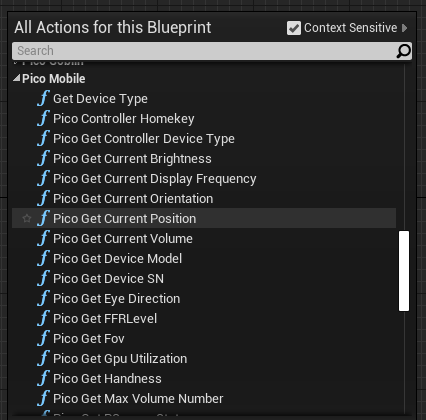
Figure 6.2 System interface
The detailed instructions for APIs are as follows:
|
Function | Get the current orientation of the headset |
| Input | None | |
| Output | None | |
| Return value | Current orientation of the headset |
|
Function | Get the current position of the headset |
| Input | None | |
| Output | None | |
| Return value | Current position of the headset |
|
Function | Get FOV |
| Input | None | |
| Output | None | |
| Return value | FOV |
|
Function | Get the system brightness |
| Input | None | |
| Output | None | |
| Return value | Current system brightness (0-255) |

|
Function | Set the system brightness |
| Input | Set the target brightness (0-255) | |
| Output | None | |
| Return value | True - set successfully, false - fail to get |

|
Function | Increase the system volume (system volume range: 0-15, which will be increased by 1 after calling once) |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Decrease the system volume (system volume range: 0-15, which will be increased by 1 after calling once) |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Get the current system volume. |
| Input | None | |
| Output | None | |
| Return value | Current system volume |
|
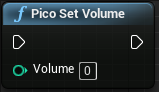
Function | Set the system volume |
| Input | The system volume you want to set (0-15) | |
| Output | None | |
| Return value | None |
|
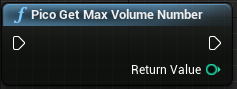
Function | Get the maximum volume |
| Input | None | |
| Output | None | |
| Return value | The number indicating the maximum volume |

|
Function | Get the serial number of the device |
| Input | None | |
| Output | Device S/N | |
| Return value | None |
|
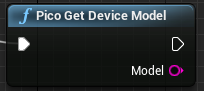
Function | Get the model of the device |
| Input | None | |
| Output | Device Model (Pico Neo3 — Pico Neo 3) (Pico Neo2 — Pico Neo 2) (Pico G2 — Pico G2) (Pico G2 4K— Pico G2 4K) | |
| Return value | None |
|
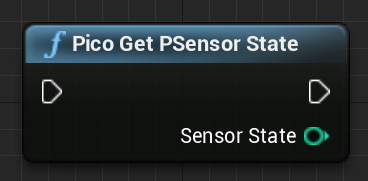
Function | Get the PSensor status (it needs to check “Enable Psensor?” in the project setup) |
| Input | None | |
| Output | -1-Fail to get (uncheck “Enable PSensor”?) 0-close to device 1-away from the device | |
| Return value | None |
|
Function | Get the dominant hand of the system Settings |
| Input | None | |
| Output | None | |
| Return value | 0:Right Hand, 1:Left Hand |
|
Function | Enable or disable Foveation Rendering |
| Input | Enable FFR or not | |
| Output | None | |
| Return value | True:Success, False:Failed |
|
Function | Get FFR Level |
| Input | None | |
| Output | FFR Level | |
| Return value | True:Success,False:Failed |

|
Function | Set FFR Level |
| Input | FFR Level | |
| Output | None | |
| Return value | True:Success,False:Failed |
|
Function | Set FFR parameters |
| Input | FFR control parameters | |
| Output | None | |
| Return value | True:Success,False:Failed |
|
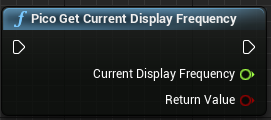
Function | Get device DisplayFrequency |
| Input | None | |
| Output | DisplayFrequency | |
| Return value | True:Success,False:Failed |
|
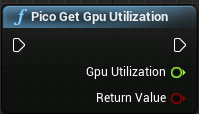
Function | Get device GPU Utilization (Only Neo 2 supports) |
| Input | None | |
| Output | GPU Utilization(0~1) | |
| Return value | True:Success,False:Failure |
|
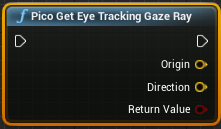
Function | Get Eye Position and Direction (it needs to check “Enable Eye Tracking” in the project setup, and Only Neo 2 Eye supports) |
| Input | None | |
| Output | Eye Position and Direction | |
| Return value | True:Success,False:Failed |
|
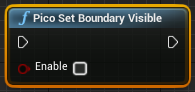
Function | Set result whether the safety border grid is resident (only Neo 2, Neo 2 Eye support) |
| Input | Bool type True:Open,False:Close | |
| Output | None | |
| Return value | None |

|
Function | Get result whether the safety border grid is resident (only Neo 2, Neo 2 Eye support) |
| Input | None | |
| Output | None | |
| Return value | Bool type True:Open,False:Close |

|
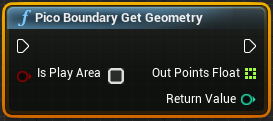
Function | Get the dimension of the customized PlayArea Neo 2 Eye support) |
| Input | Bool: whether the quadrilateral is connected in a safe zone or not | |
| Output | None | |
| Return value | x: length of PlayArea, y:1, z:width of PlayArea, if It is the security zone in situ, V3 is (0, 0, 0) |
|
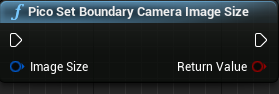
Function | Set the image size of the camera |
| Input | IntPoint(x,y),and the scale of 1:1 and the size(640,640)are suggested. | |
| Output | None | |
| Return value | Whether Bool succeeds or not |
|
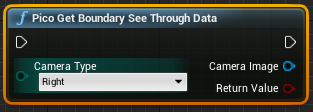
Function | Get the image of the camera |
| Input | CameraType: Left - Left camera, Right - Right camera | |
| Output | None | |
| Return value | Texture2D image, Whether Bool succeeds or not |
|
Function | Set result whether security boundary detection is turned on (only Neo 2, Neo 2 Eye support) |
| Input | None | |
| Output | Bool value | |
| Return value | True:Security boundary opened,False:Security boundary closed |

|
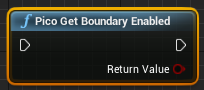
Function | Get whether the system have a valid security boundary (only Neo 2, Neo 2 Eye support) |
| Input | None | |
| Output | Bool value | |
| Return value | True:There is a valid boundary,False:No valid boundary exists |
|
Function | Get an array of safe zone coordinates |
| Input | Bool: whether the quadrilateral is connected in a safe zone or not | |
| Output | Array of safety zone coordinate values, number of safety zone coordinates | |
| Return value | Number of safety zone coordinates |
|
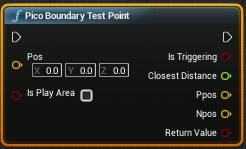
Function | Return to the state in which the tracking node triggers a secure boundary |
| Input | Nodes: head, hand. Bool: whether the quadrilateral is connected in a safe zone or not | |
| Output | IsTriggering: whether the node touches the border Closest Distance: nearest distance Ppos: coordinates of the nearest point Npos: normal of the nearest point coordinates | |
| Return value | True:Success,False:Failure |
|
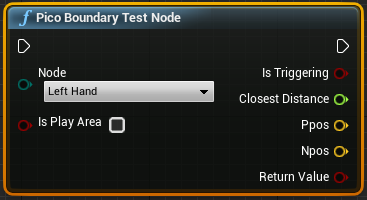
Function | Return to the state in which the tracking node triggers a secure boundary |
| Input | Enumerated nodes: head, hand Bool: whether the quadrilateral is connected in a safe zone or not | |
| Output | IsTriggering: whether the node touches the border Closest Distance: nearest distance Ppos: coordinates of the nearest point Npos: normal of the nearest point coordinates | |
| Return value | True:Success,False:Failure |
6.3 System related interface¶
Through system related interface, developers can obtain and set configuration. Developers can use this function in accordance with their needs (generally, this function is not needed).
Supporting equipment:
| Devices | PUI Version |
|---|---|
| G2 4K/G2 4K E/G2 4K Plus | 4.0.3 and above |
| Neo 3 Pro/Neo 3 Pro Eye | All PUI versions |
Before calling the system interface, it is required to add “PicoSystemToolService” component to the blueprint of the system interface. The system related interfaces are implemented in this component.
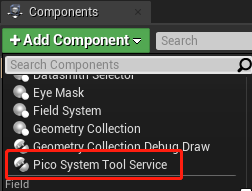
Figure 6.3 Add PicoSystemToolService component
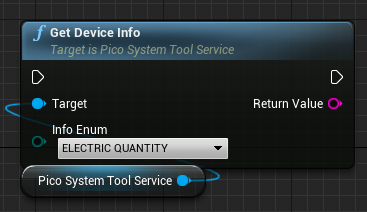
Figure 6.4 Sample for calling
6.3.1 Common interface¶
|
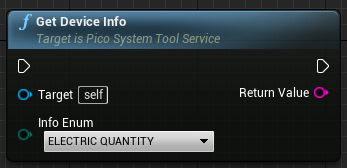
Function | Get device info |
| Input | Get device info type | |
| Output | None | |
| Return value | Device info |
Device info type is shown in the following table:
| ESystemInfoEnum | Implication |
| ELECTRIC_QUANTITY | Battery level |
| PUI_VERSION | PUI version |
| EQUIPMENT_MODEL | Device model |
| EQUIPMENT_SN | Device SN |
| CUSTOMER_SN | Customer SN |
| INTERNAL_STORAGE_SPACE_OF_THE_DEVICE | Storage space of the device |
| DEVICE_BLUETOOTH_STATUS | Bluetooth status |
| BLUETOOTH_NAME_CONNECTED | Name of bluetooth connection |
| BLUETOOTH_MAC_ADDRESS | Mac address of bluetooth |
| DEVICE_WIFI_STATUS | WIFI connection status |
| WIFI_NAME_CONNECTED | Name of connected WiFi |
| WLAN_MAC_ADDRESS | Mac address of WLAN |
| DEVICE_IP | Device IP |
The Key event types are shown in the following table:
|
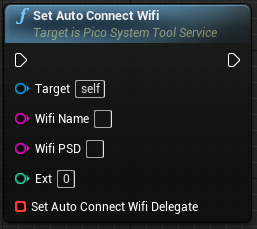
Function | Connect to the specified WiFi |
| Input | WifiName: WiFi name; WifiPSD: WiFi password; Ext: Extended reservation; Delegate: connection callback, true: success,false: failed. | |
| Output | None | |
| Return value | None |

|
Function | Close the “Set Auto Connect Wifi” function |
| Input | Delegate: connection callback, true: success,false: failed. | |
| Output | None | |
| Return value | None |
|
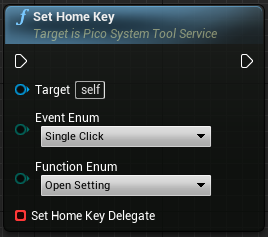
Function | Set Home key. It will redefine Home key and affect the function of Home key defined by the system. Please use this function with discretion. |
| Input | EventEnum: Key event type; FunctionEnum: Key function type; Delegate: connection callback, true: success,false: failed. | |
| Output | None | |
| Return value | None |
The Key event types are shown in the following table:
| EHomeEventEnum | Implication |
| HOME_SINGLE_CLICK (“Single Click”) | Single click Home key |
| HOME_DOUBLE_CLICK (“Double Click”) | Double click Home key |
| HOME_LONG_CLICK (“Long Click”) | Long press Home key (Not applicable for Neo 3) |
The key function types applicable for G2 series and Neo 2 series are shown in the following table:
| EHomeFuncEnum | Implication |
| VALUE_HOME_GO_TO_SETTING (“Open Setting”) | Open setting |
| VALUE_HOME_BACK (“Back”) | Back |
| VALUE_HOME_RECENTER ( “Recenter”) | Recenter |
| VALUE_HOME_OPEN_APP (“Open APP”) | Open specified app |
| VALUE_HOME_DISABLE (“Disable”) | Disable Home key |
| VALUE_HOME_GO_TO_HOME (“Open Launcher”) | Open launcher |
| VALUE_HOME_SEND_BROADCAST (“Send Broadcast”) | Send broadcast |
| VALUE_HOME_CLEAN_MEMORY (“Clear Memory”) | Clear memory |
The key function types applicable for Neo 3 series are shown in the following table:
| EHomeFuncEnum | Implication |
| VALUE_HOME_GO_TO_SETTING (“Open Setting”) | Open setting |
| VALUE_HOME_RECENTER ( “Recenter”) | Recenter |
| VALUE_HOME_DISABLE (“Disable”) | Disable Home key |
| VALUE_HOME_GO_TO_HOME (“Open Launcher”) | Open launcher |
|
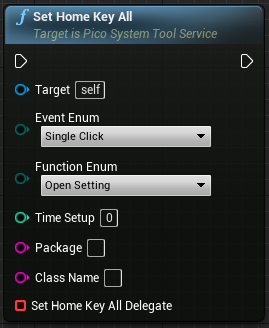
Function | Set extended function for Home key |
| Input | EventEnum: Key event type; FunctionEnum: Key function type; TimeSetup: The key interval is set only if there are events when double clicking or long pressing event. When short pressed, it will return 0. Package: When Function is opening a specified app, input specified package name; ClassName: When Function is opening a specified app, input specified class name; Delegate: connection callback, true: succeed,false: failed. | |
| Output | None | |
| Return value | None |
|
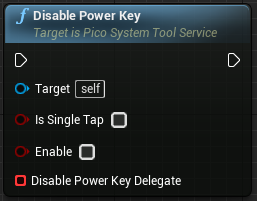
Function | Set Power key |
| Input | IsSingleTap: Single click event - True, double click event - False; Enable: the key is enabled/ not enabled Delegate: connection callback, 0: succeed,1: failed. | |
| Output | None | |
| Return value | None |
|
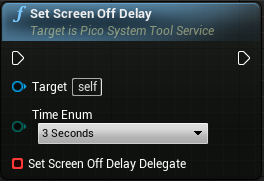
Function | Set screen off delay |
| Input | TimeEnum: screen off time; Delegate: callback, 0: succeed,1: failed; 10: the time is too long. | |
| Output | None | |
| Return value | None |
|
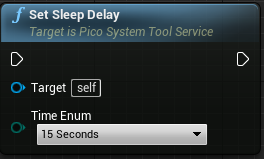
Function | Set sleep delay |
| Input | TimeEnum: system sleep time | |
| Output | None | |
| Return value | None |
|
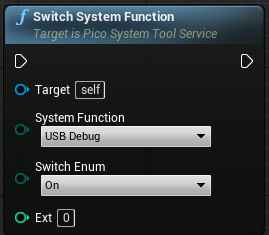
Function | Set commonly used system switch |
| Input | SystemFunction: function type; SwitchEnum: on/off; Ext: extended reservation | |
| Output | None | |
| Return value | None |
Function types are shown in the following table:
| ESystemFunctionSwitchEnum | Implication |
| SFS_USB (“USB Debug”) | USB debugging switch |
| SFS_AUTOSLEEP (“Auto Sleep”) | Auto sleep switch |
| SFS_SCREENON_CHARGING (“ScreenOn Charging”) | Screenon charging switch |
| SFS_OTG_CHARGING (“OTG Charging”) | OTG charging switch |
| SFS_RETURN_MENU_IN_2DMODE (“Show Back Menu in 2D mode”) | Show Back Menu in 2D mode switch |
| SFS_COMBINATION_KEY (“Combination Key”) | Combination key switch |
| SFS_CALIBRATION_WITH_POWER_ON(“Calibration wiht power on”) | Calibration with power on switch |
| SFS_SYSTEM_UPDATE (“System Update”) | System update switch |
| SFS_CAST_SERVICE (“Cast Service”) | Cast service switch. This property does not take effect when the industry solution switch is on. |
| SFS_EYE_PROTECTION (“Eye Protection”) | Eye protection switch |
| SFS_SECURITY_ZONE_PERMANENTLY(“Security Zone Permanently”) | Security zone permanently on/ off switch |
| SFS_GLOBAL_CALIBRATION (“Global Calibration”) | Global calibration switch (only G2 series have this switch and Neo 2 series do not have.) |
| SFS_Auto_Calibration (“Auto Calibration”) | Auto calibration switch |
| SFS_USB_BOOT (“USB Boot”) | USB Boot switch |
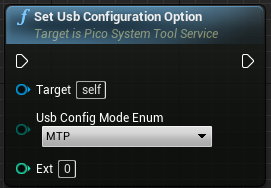
|
Function | Set USB configuration (MTP, charging) |
| Input | UsbConfigModeEnum: MTP., charging; Ext: extended reservation | |
| Output | None | |
| Return value | None |
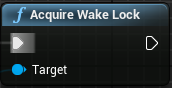
|
Function | Acquire WakeLock |
| Input | None | |
| Output | None | |
| Return value | None |
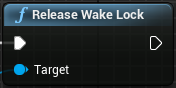
|
Function | Release WakeLock |
| Input | None | |
| Output | None | |
| Return value | None |
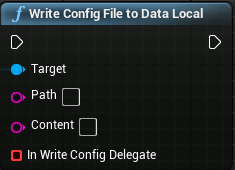
|
Function | Write config file to path /data/local/tmp |
| Input | Path: The path of config file to be written to; Content: Config file details; Delegate: whether config file is written with success, True: Success, False: Failed | |
| Output | None | |
| Return value | None |

|
Function | Restore system key configurations |
| Input | Delegate: whether restoring success; True: Success, False: Failed | |
| Output | None | |
| Return value | None |
|
Function | Enable headset confirm button |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Disable headset confirm button |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Enable headset volume button |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Disable headset volume button |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Enable headset back button |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Disable headset back button |
| Input | None | |
| Output | None | |
| Return value | None |
6.3.2 Protected interfaces¶
Notes: The following interfaces are protected interfaces. Before calling them, it is required to check the “Use Pico Advance Interface” option in Project Settings -> Plug-in ->PicoMobile. If this option is checked, your app will not be available on the Pico Store. If your app needs to be distributed through the Pico Store, please do not check the “Use Pico Advance Interface” option or use these Interfaces.
|
Function | Make the device to shut down or reboot |
| Input | DeviceControllerEnum: make the device to shut down or reboot Delegate: callback, 0: succeed,1: failed. | |
| Output | None | |
| Return value | None |
|
Function | Silently install or uninstall app |
| Input | PackageControlEnum: install or uninstall; Path: The path to the installation package for the silent installation or the name of the app package when silently uninstalled; Ext: Extended reservation interface; Delegate: callback, 0: succeed,1: failed. | |
| Output | None | |
| Return value | None |
|
Function | Set screen on |
| Input | None | |
| Output | None | |
| Return value | None |
|
Function | Set screen off |
| Input | None | |
| Output | None | |
| Return value | None |